Cygnus-X1, una placa open source para el control de cohetes caseros
 Creo que muchos de nosotros soñamos de niños con tener algún día el privilegio de poder tener o volar un cohete casero o una mini nave diseñada para volar y sobre todo de tener un mando el cual nos pudiera dar la libertad de poder dirigirlo a nuestro antojo.
Creo que muchos de nosotros soñamos de niños con tener algún día el privilegio de poder tener o volar un cohete casero o una mini nave diseñada para volar y sobre todo de tener un mando el cual nos pudiera dar la libertad de poder dirigirlo a nuestro antojo.
Hoy en día, como tal ese sueño ya lo han cumplido muchos pues existen algunos modelos comerciales que puedes adquirir o también en el caso de los drones también el algo parecido a lo que hubiéramos querido de niños.
Pero seamos honestos, a muchos nos hubiera encantado poder diseñar el dispositivo con nuestras manos y sobre todo el poder aprender a montarlo y su funcionamiento de cada parte.
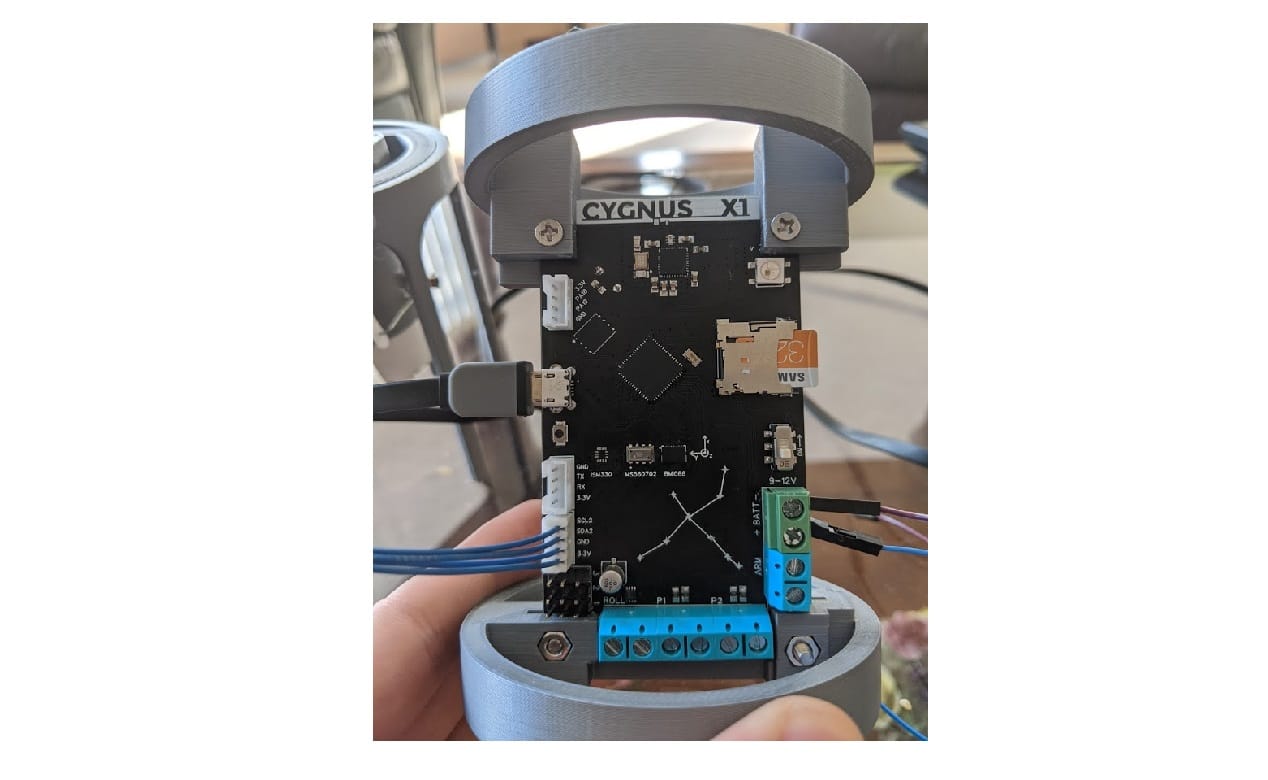
Y bueno en el día de hoy vengo a compartir información que encontré en la red sobre algo similar a lo que describo y es que el proyecto Cygnus-X1 desarrolla una placa de código abierto para el control del vector de empuje del motor a reacción y los sistemas a bordo relacionados.
Los entusiastas pueden utilizar la placa para estabilizar el vuelo de cohetes caseros y sobre todo y lo más importante de este proyecto, es que los desarrollos del proyecto se distribuyen bajo la licencia GPLv3.
Con lo cual podremos encontrar una gran cantidad de esquemas disponibles, diseño de PCB y especificaciones para el simulador EasyEDA (Electronic Design Automation).
Otra de las características que se destaca del proyecto, es que la placa es totalmente compatible con los entornos de desarrollo Arduino IDE y Platformio.
Además de que los componentes del software están escritos en C++ y como base, se utiliza el microcontrolador SAMD51, que opera a una frecuencia de 120 MHz y tiene 1 MB de memoria Flash incorporada.
Se puede utilizar una tarjeta Flash o SD externa para registrar la telemetría durante el vuelo. Los datos y los comandos se transmiten a través de Bluetooth Low Energy (BLE), que le permite utilizar un teléfono inteligente normal para el control.
Se proporcionan tres canales de servocontrol: dos para el movimiento de la boquilla cuando cambia el vector de empuje y uno para otros sistemas, por ejemplo, para activar el despliegue del paracaídas. También hay dos pirocanales para encendido y bujías incandescentes y un canal de control del motor eléctrico para cambiar el rollo mediante un girodina.
Las baterías LiPo 2S o 3S se pueden utilizar como fuente de alimentación. Entre los sensores utilizados se encuentran un giroscopio-acelerómetro combinado (IMU BOSCH BMI088) y un altímetro (MS560702). Los conectores UART e I2C están disponibles para conectar sensores adicionales como un módulo GPS.
De las características que se destacan del proyecto, se mencionan las siguientes:
- Basado en el microcontrolador SAMD51 que funciona a 120 MHz con 1 MB de flash. (ATSAMD51J20A-MUT).
- Controlable por Bluetooth Low Energy (BLE), esto permite poder enviar y recibir datos entre el cohete y un smartphone.
- 3 Servo Canales (Dos de los canales son usados para vectorización de empuje y uno para otras cosas como un sistema mecánico de expulsión de paracaídas).
- 2 Canales Pyro capaces de encender encendedores de motor y alambre de nicrom. Totalmente controlable por PWM para control de corriente variable.
- 1 controlador de motor de CC para aquellos momentos en que necesita control de balanceo con una rueda de reacción.
- Funciona con baterías LIPO 2S y 3S. 3S preferible (11,1 V)
- Incluye un terminal de armado para evitar que se produzcan fallos en los canales pirotécnicos.
- IMU de seis ejes (BOSCH BMI088) y altímetro (MS560702)
- Puerto de tarjeta SD para que puedas guardar tus datos.
- 16 MB de almacenamiento flash externo. Guarde los datos durante el vuelo (las conexiones de la tarjeta SD pueden ser esporádicas durante el vuelo debido a las vibraciones)
- Buzzer y LED RGB Neopixel
- Conexiones adicionales UART e I2C en caso de que desee conectar sensores externos como un módulo GPS.
Finalmente, si estás interesado en conocer más al respecto del proyecto puedes consultar los detalles, manuales y diagramas en el siguiente enlace.